ROSA HCPクラスターの更新
演習の概要
このモジュールでは、ROSA HCPクラスターの更新を実行します。
ROSA HCPクラスターは、コントロールプレーンとワーカーノードから構成されており、 この2つは、個別に更新されます。 最初にコントロールプレーンを更新して、次にワーカーノードをMachinepool単位で更新していきます。 更新方法は、SingleAZ/MultiAZ構成の共に同じものとなります。
ここでは、OCMとROSA CLIを利用した更新方法をご紹介します。
| 本演習をワークショップ形式で実施している場合、 「ROSA CLIを利用したワーカーノードの更新」以外の項目を実施できません。 これらの項目については、インストラクターによる紹介のみとなります。 |
OCMを利用したコントロールプレーンの更新
OpenShift Cluster Manager (OCM)を利用して、 ROSA HCPクラスターを手動で更新できます。ROSAの場合、通常のOpenShiftとは異なり、 OpenShiftのWebコンソールとCLI(ocコマンド)によるアップグレードができないようになっています。 そのため、OCMや後述するROSA CLIによるアップグレードを実施する必要があります。
OCMにログインして、 コントロールプレーンを更新するROSA HCPクラスターを選択し、 Settingsタブをクリックして、「Update」ボタンをクリックします。
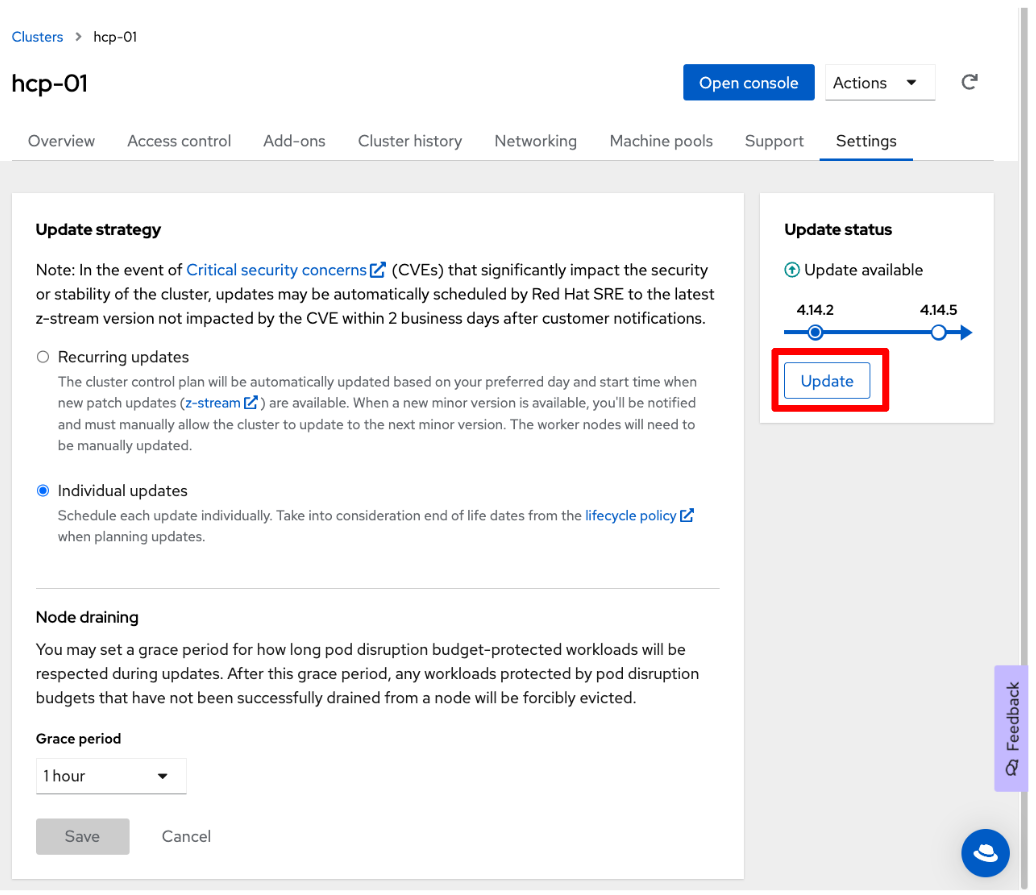
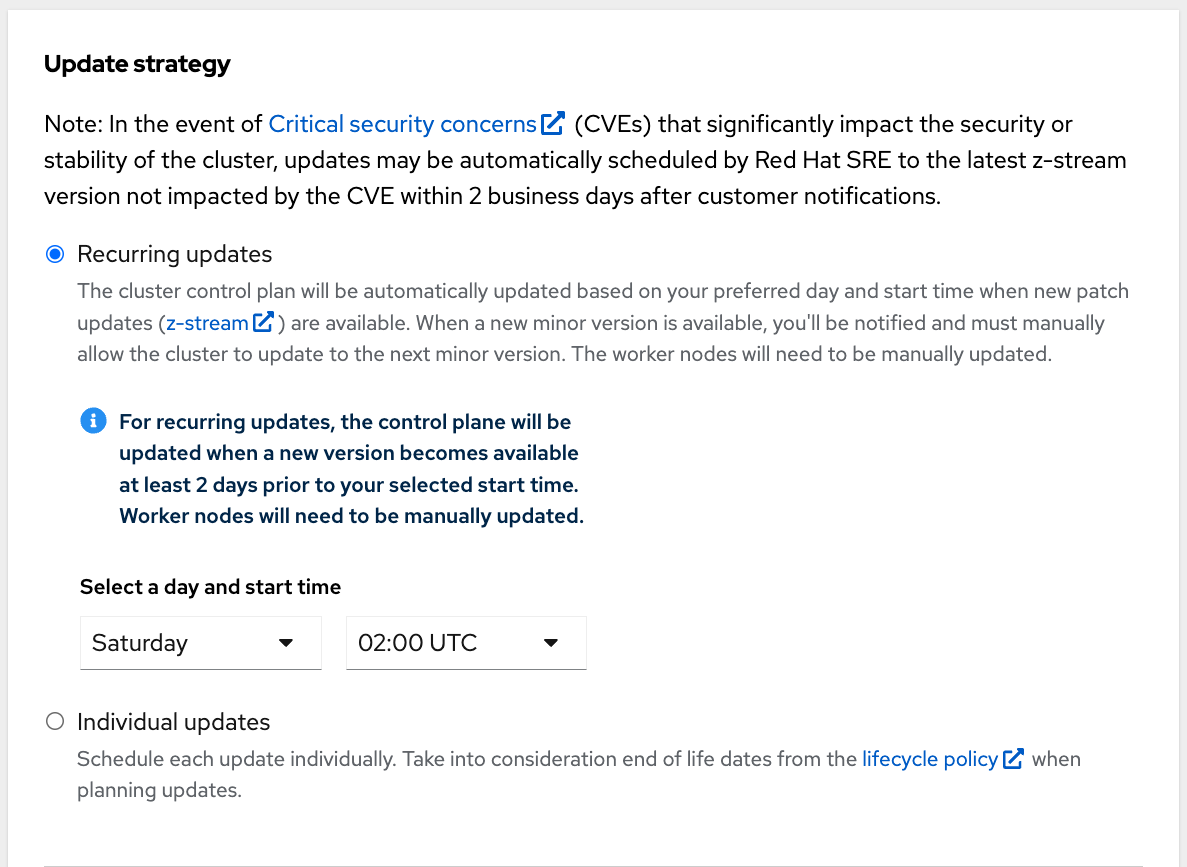
ここで「Update strategy」の「Recurring updates」を選択すると、 指定した日時の2日前以上にリリースされたz-streamの更新(4.14.5など)が、 ROSA HCPクラスターのコントロールプレーンに、指定したタイミングで、毎週自動適用されます。
新しいマイナーバージョン(4.15や4.16など)がリリースされた場合は、利用者にメールなどで通知され、 次のマイナーバージョンに更新されることを手動で許可する必要があります。
OCMでコントロールプレーンの自動更新を有効にしている場合でも、 ワーカーノードは手動で更新する必要があります。
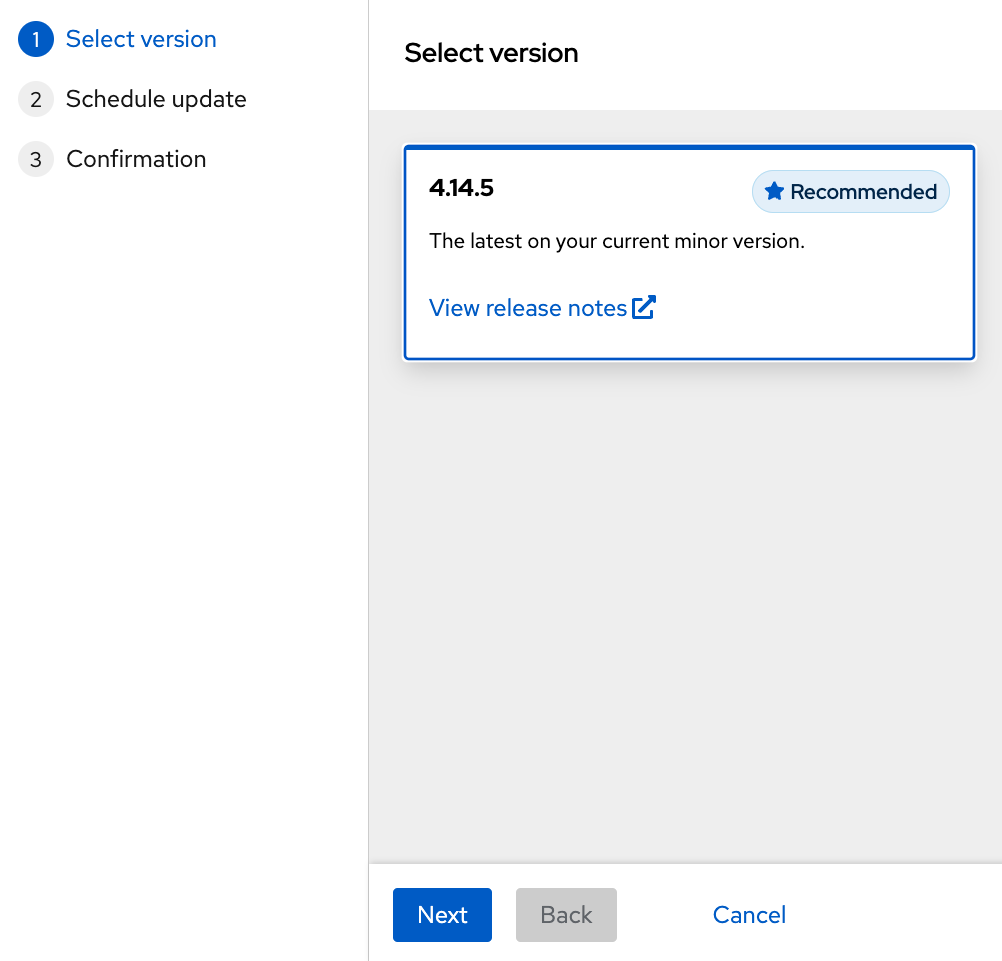
更新するバージョンを選択して、「Next」をクリックします。
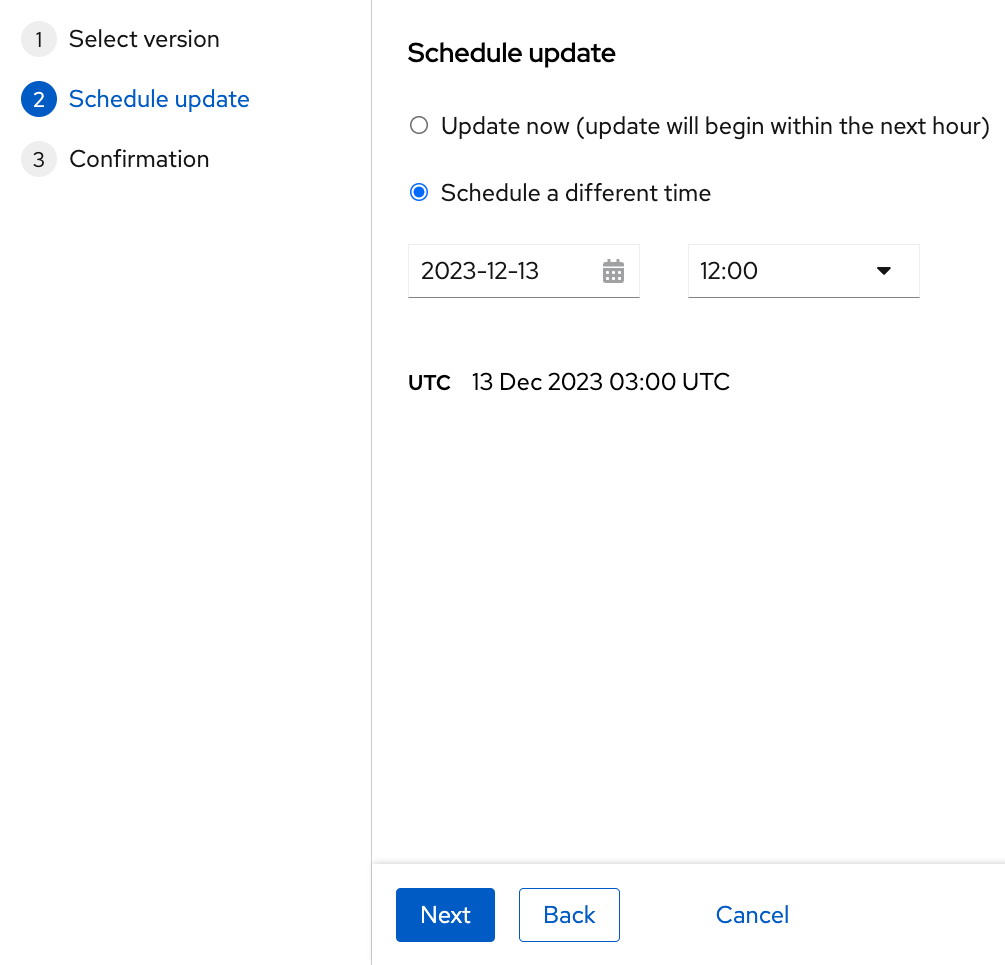
コントロールプレーンの更新をスケジュールします。 デフォルトでは「Update now」が選択されており、ROSA HCPクラスターでは、 現在の時刻から約5分後に更新されるようスケジューリングされます。 指定した時間にアップグレードするには、「Schedule a different time」を選択し、アップグレードの日時を設定します。 どちらかを選択して、「Next」をクリックします。
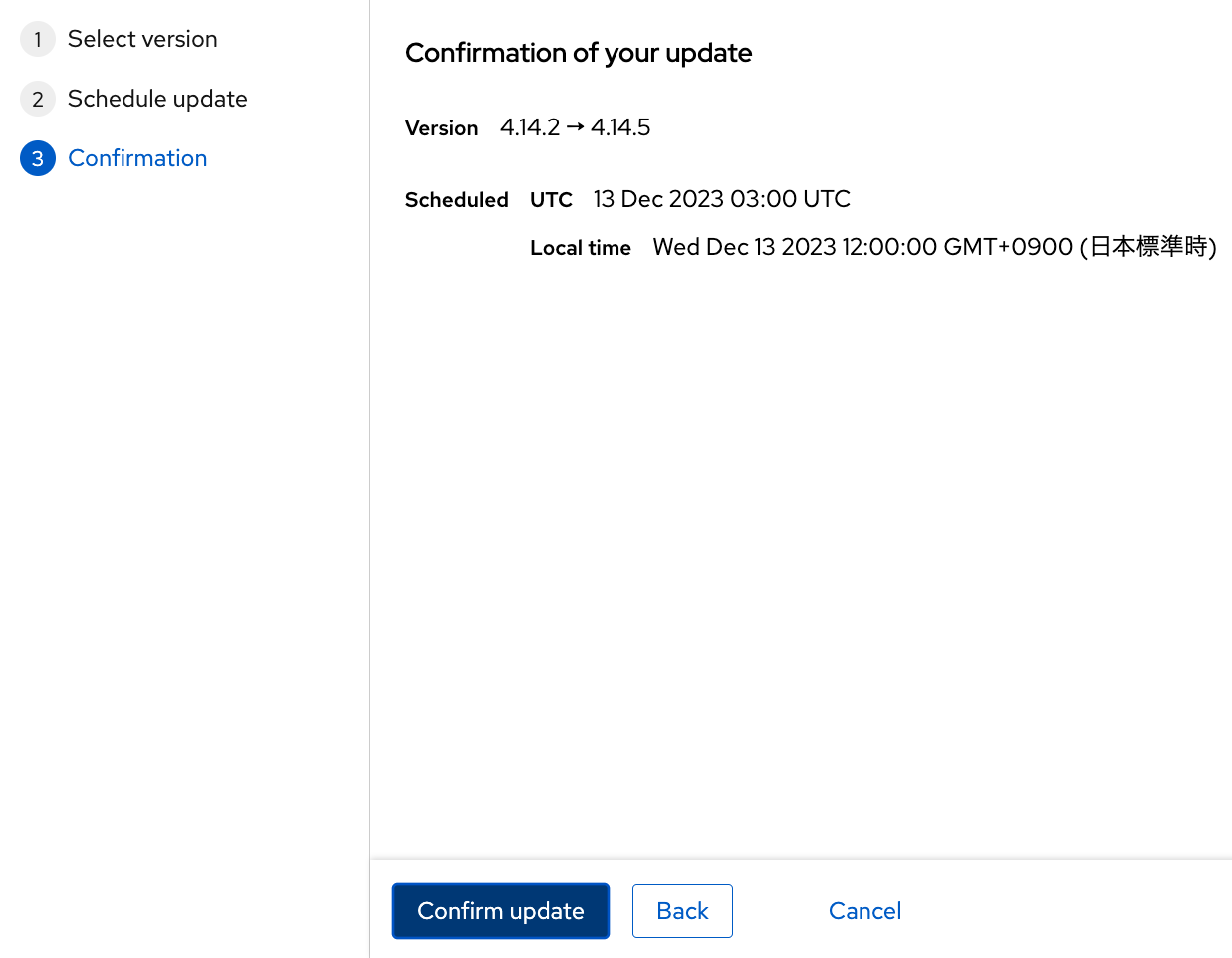
更新するバージョンとスケジュールを確認したら、 「Confirm Update」をクリックして、更新をスケジュールします。
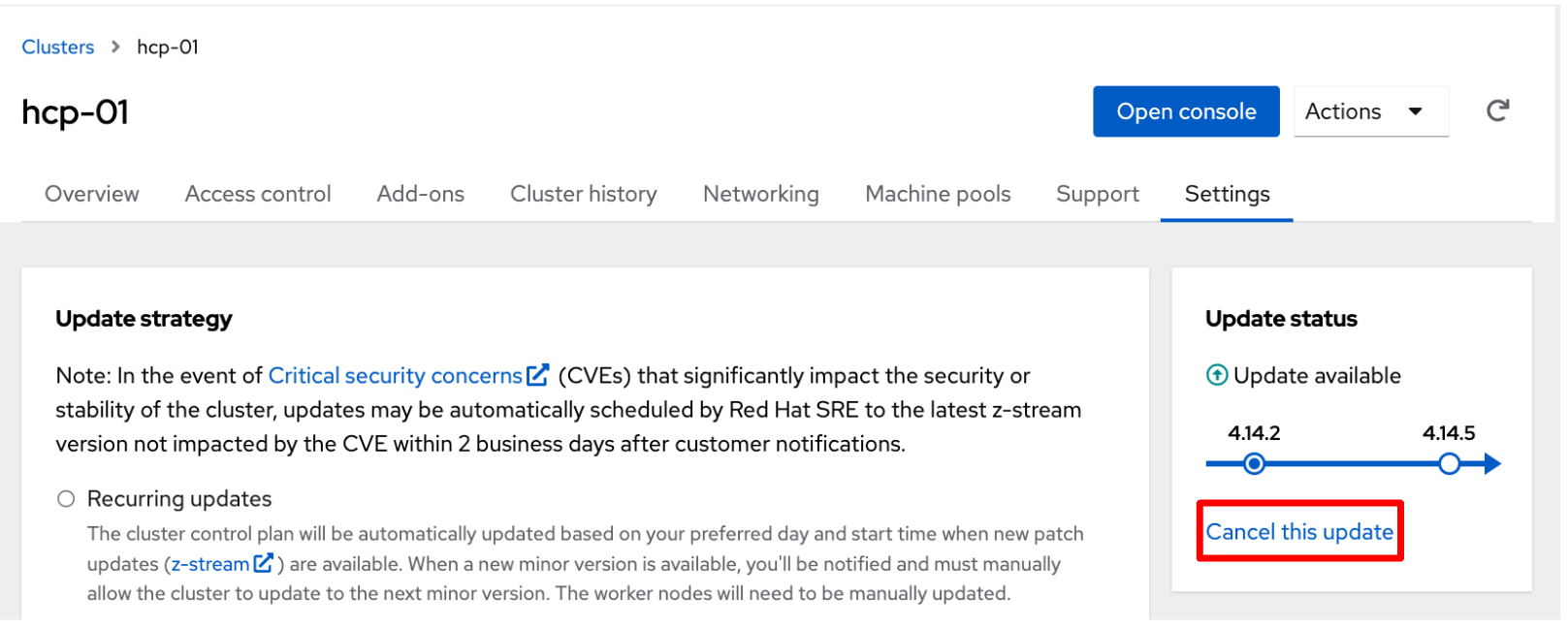
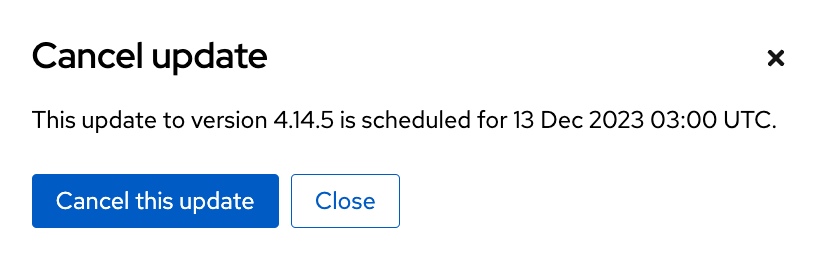
コントロールプレーンのアップグレードをキャンセルしたい場合、 「Cancel this update」からキャンセルできます。
これによって、予定された時刻になると、ROSA HCPクラスターのコントロールプレーン更新が開始されます。 コントロールプレーン更新の所要時間は、およそ15分ほどです。
OCMを利用したワーカーノードの更新
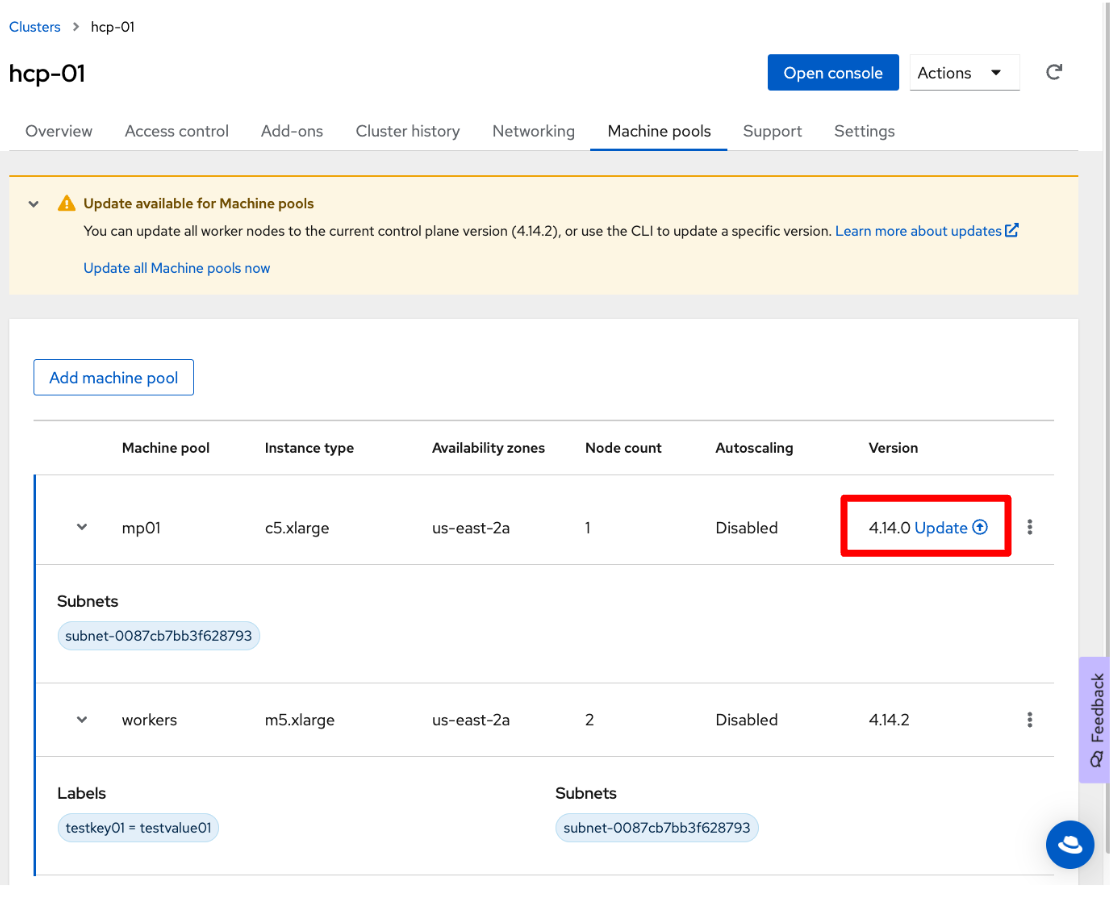
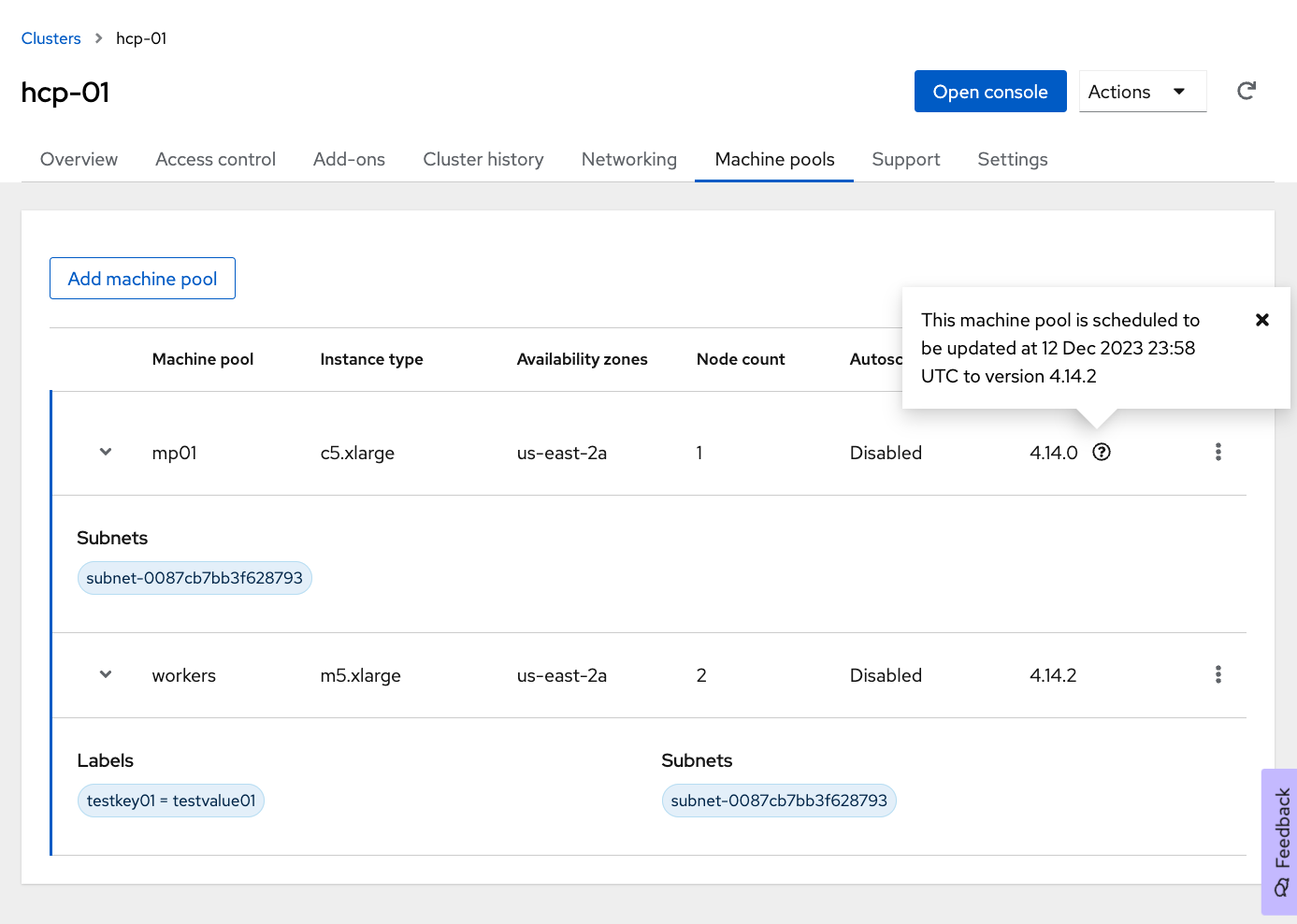
ROSA HCPクラスターでは、コントロールプレーンより古いバージョンのワーカーノードのMachinepoolがあると、 Machinepool単位でワーカーノードを更新できます。
OCMでは、更新可能なMachinepoolがある場合、 指定したMachinepol、または、全てのMachinepoolを更新できます。 OCMでMachinepoolを更新する場合、約5分後に更新がスケジュールされます。 更新時刻を指定したい場合、ROSA CLIを利用する必要があります。
ワーカーノードの更新は、インプレースアップグレードではなく、 新規ワーカーノードの追加と既存ワーカーノードの削除を実行します。 Machinepoolに複数台のワーカーノードが紐づいている場合、台数分のワーカーノードを一括作成および削除するのではなく、 ワーカーノードの新規追加と削除が1台ずつ自動実行されていきます。
更新の際に、削除対象のワーカーノード上でPodが実行している場合、Podの停止(SIGTERM)と再作成が実行されますので、 冗長性を考慮してPodのレプリカ数を複数個設定しておくことを推奨します。Podの停止不可の場合は、 Podの強制停止(SIGKILL)が実行されます。これについては、 公式ドキュメントをご参照ください。
| このROSA Labでは詳細を扱いませんが、 Podのレプリカ数は、 Kubernetesのワークロード(デプロイ設定に利用するDeploymentなど)の中で定義できます。 |
なお、1台のワーカーノードの更新(新規ノード作成と既存ノードの削除)にかかる所要時間は、 およそ5~10分ほどです。
| ROSA HCP 4.15+ではMachinePool内の特定のノードについて、 Podのスケジューリング可否の設定(cordon/uncordon)とPodの退避(drain) を実行できるようになりました。これによって、ワーカーノードの更新や削除に伴って必要となるアプリケーションの事前退避が可能になります。 |
ROSA CLIを利用したコントロールプレーンの更新
OCMのコンソールの他に、ROSA CLIを使用してROSA HCPクラスターの コントロールプレーンの更新をスケジュールできます。 次のコマンドを実行して、利用可能な更新情報を確認します。
$ rosa list upgrade cluster -c hcp-01
VERSION NOTES
4.14.5 recommendedここで確認した更新情報を適用するためのスケジュールを設定します。
下記は、2023年12月13日の23時(UTC)に、更新をスケジューリングしている例です。
rosa upgrade cluster コマンドでは、ROSAクラスターやそのOperatorによって利用されるIAMロールも、
適宜更新されます。
$ rosa upgrade cluster -c hcp-01 --control-plane \
--schedule-date 2023-12-13 --schedule-time 23:00 \
--version 4.14.5 --mode auto --yes
I: Ensuring account and operator role policies for cluster '280scqkn8ocjoochasq423tg4donvpaq' are compatible with upgrade.
I: Account roles with the prefix 'ManagedOpenShift' have attached managed policies.
I: Cluster 'hcp-01' operator roles have attached managed policies. An upgrade isn't needed
I: Account and operator roles for cluster 'hcp-01' are compatible with upgrade
I: Upgrade successfully scheduled for cluster 'hcp-01'指定した更新のスケジュールを確認できます。
$ rosa list upgrade cluster -c hcp-01
VERSION NOTES
4.14.5 recommended - scheduled for 2023-12-13 23:00 UTCrosa delete upgrade コマンドで、更新のキャンセルをすることができます。
キャンセルすると、更新のスケジュールが削除されていることを確認できます。
$ rosa delete upgrade cluster -c hcp-01
? Are you sure you want to cancel scheduled upgrade on cluster 'hcp-01'? Yes
I: Successfully canceled scheduled upgrade on cluster 'hcp-01'
$ rosa list upgrade cluster -c hcp-01
VERSION NOTES
4.14.5 recommendedROSA CLIを利用したワーカーノードの更新
Machinepoolを新規に作成して、更新コマンド確認用のワーカーノードを1台追加します。
この時、選択する「OpenShift version」は、最新より古いバージョンを選択してください。
また、「Instance type」は、デフォルトの m5.xlarge と区別しやすいように c5.xlarge を指定します。
$ rosa create machinepool -c hcp-01
I: Enabling interactive mode
? Machine pool name: mp20
? OpenShift version: [Use arrows to move, type to filter, ? for more help]
4.14.2
4.14.1
> 4.14.0
? OpenShift version: 4.14.0
? Select subnet for a hosted machine pool: No
? AWS availability zone: us-east-2a
? Enable autoscaling: No
? Replicas: 1
? Labels (optional):
? Taints (optional):
I: Fetching instance types
? Instance type: c5.xlarge
? Autorepair: Yes
I: Machine pool 'mp20' created successfully on hosted cluster 'hcp-01'
I: To view all machine pools, run 'rosa list machinepools -c hcp-01'rosa list machinepool コマンドや、
管理者アカウントでログインしたROSAクラスターのコンソールの「コンピュート」→「Node」メニューから、
追加したMachinepoolに紐づいたワーカーノードが1台作成されていることを確認できるまで待ちます。
ワーカーノードの作成が完了したら、 rosa list upgrade コマンドで、 machinepool オプションを
指定して、作成したMachinepoolの更新情報を確認します。次の例では、「4.14.1」と「4.14.2」のバージョンに
更新できることが表示されています。
$ rosa list upgrade -c hcp-01 --machinepool mp20
VERSION NOTES
4.14.2 recommended
4.14.1Machinepoolの更新を rosa upgrade machinepool コマンドでスケジュールします。
interactive オプションで、対話形式でパラメータを与えていくように指定します。
なお、時刻はUTC形式で指定します。日本時間はこれより9時間進んでいることを考慮してください。
$ rosa upgrade machinepool mp20 -c hcp-01 --interactive
I: Interactive mode enabled.
Any optional fields can be left empty and a default will be selected.
? Enable automatic upgrades: No
? Please input desired date in format yyyy-mm-dd: 2023-12-13
? Please input desired UTC time in format HH:mm: 23:00
? Machine pool version: 4.14.1
? Are you sure you want to upgrade machine pool 'mp20' to version '4.14.1'? Yes
I: Upgrade successfully scheduled for the machine pool 'mp20' on cluster 'hcp-01'更新実行を待つ場合は、ROSAクラスターに管理者アカウントでログインして、 「コンピュート」→「Node」メニューから、 Machinepoolに紐づいたワーカーノードが新規作成されて、削除されることを確認してみてください。
Machinepool更新のスケジュールを削除する場合は、 rosa delete upgrade コマンドを実行します。
$ rosa delete upgrade -c hcp-01 --machinepool mp20 --yes
I: Successfully canceled scheduled upgrade for machine pool 'mp20' for cluster 'hcp-01'最後に、Machinepool更新について一通り確認した後は、不要になったMachinepoolを、
rosa delete machinepool コマンドで削除してください。
$ rosa delete machinepool mp20 -c hcp-01 --yes
I: Successfully deleted machine pool 'mp20' from hosted cluster 'hcp-01'